Эффект
Человеческого Пчелиного Роя, методика
Параллельного Распределённого Интеллекта
в режиме реального времени
Луис
Б. Розенберг
Anonimous
A.I., Сан Франциско, Калифорния, США
Louis@UnanimousAI.com
Аннотация: Хотя уже и проводились
значительные исследования для изучения
устройства искусственных роев, большинство
подобных работ включает в себя рои
автономных роботов или имитационных
агентов. Тем не менее, мало работ было
сделано для создания искусственных
роев, соединяющих группы взаимодействующих
людей с целью развития объединённого
независимого интеллекта. Данная работа
описывает новую платформу называемуюUNU , которая
позволяет распределённым группам юзеров
собираться в режиме реального времени
в онлайн рои и решать задачи как
Искусственный Интеллект Роя (ИИР).
Спроектированная наподобие биологических
роев, платформа UNU даёт
возможность онлайн группам синхронно
работать вместе, налаживая объединённую
динамическую систему, которая может
быстро отвечать на вопросы и принимать
решения путём исследования пространства
решений и схождения на предпочитаемом
решении. Начальное тестирование
предполагает, что человеческие рои
имеют большой потенциал для реализации
коллективного интеллекта онлайн групп,
часто превосходящий индивидуальные
возможности.
-
ВВЕДЕНИЕ
Исследователи использовали разнообразные
методы для налаживания связи с коллективным
разумом человеческого населения: начиная
с голосований и опросов и заканчивая
рынком предсказаний. Данные методы
имеют основную общую характеристику –
индивидуальные участники предоставляли
свои предложения изолированно, их вклады
затем агрегировались с предложениями
от остальных. Не имея взаимосвязи,
участники голосований, опросов и рынков
предсказаний едва ли могут составить
объединённый коллективный разум,
поскольку каждый юзер работает отдельно,
без взаимодействия с другими членами
группы. В результате, методы голосований
эффективны для выражения «среднего
мнения», описывающего население, но им
не хватает структуры, необходимой для
возникновения коллективного разума
населения в режиме реального времени.
К тому же, методы коллективного разума,
которые позволяют юзерам влиять друг
на друга, как правило, делают это
асинхронно. Например, онлайн форумы
такие как Reddit и Diggдают возможность популярному
контенту подниматься и опускаться с
помощью непрерывных голосований «за»
и «против». Похожим образом, рынки
предсказаний позволяют поднимать и
опускать схожий контент с помощью
непрерывных покупок и продаж. В то время
как данные методы являются более
интерактивными чем типичные голосования
и опросы, их асинхронная сущность
означает, что каждый юзер влияет на
мнения тех, кто отвечает позже во времени.
Недавние исследования показывают, что
данный тип асинхронности очень сильно
искажает групповые решения с помощью
эффектов социального влияния, известных
как «стадное чувство» и «нарастание
снежным комом». Одно из таких исследований[1] обнаружило, что один
лайк или плюс поставленный первым на
онлайн форуме, оказывает влияние на
финальное решение группы более чем на
25%. Подобным образом, рынки
предсказаний страдают от таких последствий
асинхронности, как моментные эффекты,
ценовые пузыри, искажение рисков и
избыточная коррекция.
Тем не менее, голосования, опросы и рынки
крайне ценны для выявления средних
мнений групп, но это не то же самое, что
дать возможность группам думать
вместе, как единая система. Для создания
истинного коллективного разума среди
большого числа индивидов, мы обращаемся
к биологии и процессу роения. Параллельная
структура естественного роения по своей
природе ограничивает эффекты социальной
зависимости (например, «нарастание
снежным комом», которое возникает при
последовательном голосовании), давая
возможность большой группе достигать
общей цели как единой системе. В
последующих разделах описывается новая
платформа UNU , разработанная
для воплощения и изучения человеческого
роения.
-
РОИ
КАК РАСПРЕДЕЛЁННЫЙ МОЗГ
Прежде чем описывать технические
подробности человеческого роения,
полезно было бы дать определение слова
«рой» в контексте данной работы. Многие
исследователи используют «рой» для
обозначения децентрализованных сетей
состоящих из роботов или симулированных
агентов с простыми локализованными
правилами, так что коллективный разум
возникает из их локального взаимодействия[3]. Такие системы в основном
созданы наподобие стай птиц или косяков
рыб, которые известны умением двигаться
в сложном пространстве используя схожие
процессы. В то время как эти типы систем
имеют множество полезных применений,
рои используемые в платформе UNU
спроектированы не столько с учётом
поведения стай и косяков, сколько с
учётом децентрализованного процесса
принятия решений используемого роями
медоносных пчёл. Данная модель была
выбрана, поскольку возникающий процесс
принятия решений у пчёл представляет
собой мощный многоагентный аналог того,
как неврологический мозг приходит к
сложному решению. Это поддерживает
первоочередную цель платформы UNU –
дать возможность группам взаимосвязанных
юзеров принимать сложные и детальные
решения как единый разум, или мозг из
мозгов.
Как показано в исследованиях Силей с
соавторами, процессы принятия решений
в пчелиных роях и неврологических мозгах
невероятно схожи по многих параметрам[4]-[8]. В обоих используется
многочисленные множества простых
чувствительных к раздражению юнитов
(пчёлы и нейроны), которые работают
параллельно для интеграции данных,
взвешивания конкурирующих альтернатив
и принятия единого решения. В обоих
итоговое решение появляется путём
соревнования в закрытой системе в
реальном времени между подгруппами
разделённых возбудимых юнитов, где
каждая подгруппа соревнуется за
определённую альтернативу. Когда одна
из подгрупп превышает порог уровня
поддержки по сравнению с другими
подгруппами, выбирается соответствующая
альтернатива. Порогом для достижения
решения как в мозге, так и в пчелином
рое является не некое возбуждение юнитов
или даже простое большинство, а просто
достаточный кворум возбуждения [8].
Внутри неврологического мозга
интегрирующие нейроны действуют для
суммирования активности поддерживающих
юнитов и одновременного торможения
конкурирующих юнитов. Такая комбинация
активации и торможения помогает избегать
тупиковых, безвыходных ситуаций и
продвигать оптимальные решения. Пчелиные
рои также используют схожие комбинации
активации и торможения, чтобы подобным
образом избегать безвыходных ситуаций
и оптимизировать решения [4,8].Например, каждую весну пчелиные рои
принимают сложное коллективное решение
о выборе подходящего места для основания
новой колонии. Этот жизненно важный
выбор осуществляется несколькими
сотнями старших пчёл в рое – пчёлами
разведчиками. После разведки обширной
территории, эти разведчики предлагают
альтернативы на рассмотрение рою. Каждый
из них старается повлиять на коллективное
решение с помощью вибраций своего
тельца. В так называемом «танце колебаний»
вибрации передают сообщение о направлении
и расстоянии до возможного места для
колонии. К тому же, эти танцы могут
содержать «стоп сигналы» для торможения
других танцоров. Это обеспечивает
получение обратной связи в замкнутой
системе, используя возбуждение и
торможение.
Таким образом, также как и взаимосвязанные
нейроны, пчелиный рой составляет
замкнутую динамическую систему из
распределённых юнитов которые работают
параллельно. Каждая пчела поддерживает
пчёл со схожими альтернативами и
блокирует тех, кто поддерживает другие
варианты. Решение принимается когда
возникает достаточный кворум для
выбранной альтернативы. В этом случае,
коллективное сознание, состоящее из
нескольких сотен пчёл способно сделать
выбор из дюжин возможных мест для
колонии, расположенных на более чем
30-ти квадратных милях, оценивая каждое
с учётом множества критериев. Примечательно,
что пчёлы обычно приходят к решению
которое лучшим образом удовлетворяет
их потребности [9]. Это
происходит потому что решение достигается
не путём простого голосования, которое
могло бы привести к самому популярному
ответу, а с помощью переговоров в режиме
реального времени, в процессе которых
параллельно рассматриваются различные
опции, и участники действуют синхронизировано
до тех пор, пока не приходят к решению,
оптимизирующему удовлетворение
потребностей группы. Именно такой
независимый распределённый процесс
платформа UNU старается
обеспечить в группах взаимосвязанных
юзеров.
-
РЕАЛИЗАЦИЯ
ЧЕЛОВЕЧЕСКИХ РОЕВ
Платформа человеческих роев, известная
как UNU, была разработана
для использования коллективного разума
онлайн групп. Платформа UNUсмоделирована наподобие процесса
принятия решений у пчёл и неврологического
мозга. Платформа даёт возможность
группам взаимосвязанных юзеров отвечать
на вопросы как единая динамическая
система. И, как и в природных аналогах,
эти искусственные человеческие рои
созданы для обеспечения совместной
работы большого числа участников в
режиме реального времени для (а) сбора
данных, (б) сравнения конкурирующих
альтернатив и (в) принятия итогового
решения путём синхронного соревнования
между несколькими подгруппами.
Поскольку мы, люди, не можем использоватьтанец колебаний как пчёлы или
производить сигналы активации подобно
нейронам, необходимо было разработать
новый юзерский интерфейс, чтобы каждый
юзер выражал своё собственное мнение
и значимость своих намерений с учётом
заданных альтернатив. Вдобавок, интерфейс
должен был дать возможность юзерам
обозревать меняющуюся систему и
реагировать на неё в реальном времени,
таким образом замыкая обратную связь
внутри всей группы. Проще говоря, нужно
было создать специальный интерфейс
программы, для использования людьми
логической инфраструктуры связей для
принятия решений в пчелином рое, которая
эволюционно развивалась миллионы лет.
Проектирование Системы: платформа
даёт возможность большому числу юзеров
подключаться к центральному серверу
через свой компьютер или планшет. В
начале каждого решения всем участникам
одновременно предъявляется вопрос и
набор возможных ответов. Рой юзеров
отвечает на вопрос совместным движением
графического курсора (в форме шайбы)
для выбора между представленными
альтернативами. Каждая альтернатива
изображается как графическая цель,
равноудалённая от начального положения
курсора. Курсор спроектирован как
физическая система с определённой
массой, поглощением колебаний и силой
трения. Каждый юзер вносит свой вклад
с помощью графического магнита, который
контролируется мышкой или тачскрином.
Расположение магнита относительно
курсора передаёт намерения каждого
юзера, подобно уникальной силе,
направленной на курсор (Рис. 1). Вклад
каждого отдельного юзера называется
Вектор Намерений Юзера.
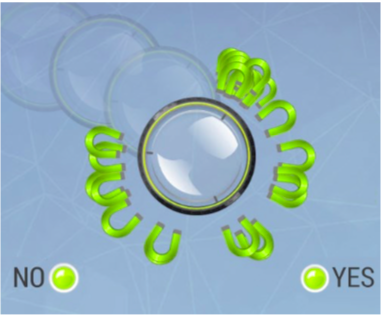
Рис.
1. Человеческий рой, состоящий из
управляемых юзерами магнитов, совместно
работает чтобы синхронно передвигать
графический курсор, как единый коллективный
разум.
Вклад каждого юзера является не дискретным
голосом или ставкой, а продолжающимся
потоком векторов, который может свободно
меняться в процессе принятия решения.
Поскольку вся группа юзеров может
корректировать свои намерения в любой
момент, курсор движется основываясь не
на вкладе отдельного индивида, а на
динамике всей системы. В результате
получаются физические переговорыв реальном времени между членами роя.
Каждый одновременно тянет и толкает:
группа вместе исследует пространство
решений и склоняется к самому приемлемому
варианту.
Нужно отметить, что юзеры видят только
свой магнит во время принятия решения,
и не видят магниты других юзеров. Таким
образом, хотя участники и видят движение
курсора в реальном времени, которое
выражает суммарные намерения роя, они
не подвержены влиянию распределения
поддержки между опциями. Это по своей
сути ограничивает социальное влияние.
Например, при замедлении курсора из-за
возникновения тупиковой ситуации,
участники должны оценить своё собственное
желание поддержать альтернативные
варианты, не зная распределение сил,
вызвавшее эту ситуацию. Это способствует
честному самоанализу вместо непроизвольной
поддержки крупной группировки. Также
нужно заметить, что после принятия
каждого решения, юзеры могут посмотреть
повтор со всеми магнитами. Это позволяет
юзерам поразмышлять о том, как их
собственные усилия соединились с другими
для получения итогового ответа.
Кроме того, хотя участники естественных
роев взаимодействуют в реальном времени,
требуется конечное время для распространения
информации между членами. В искусственных
человеческих роях (в данной работе)
импульс курсора, определяемый параметром
его массы, обеспечивает постоянное
время для распространения информации.
Было выявлено, что без импульса возникают
помехи для принятия решения. Мы считаем,
что импульс действует как фильтр низких
частот, убирая шум (колебания) из
коллективного движения курсора, который
может быть следствием различия скоростей
реакции участников на изменения.
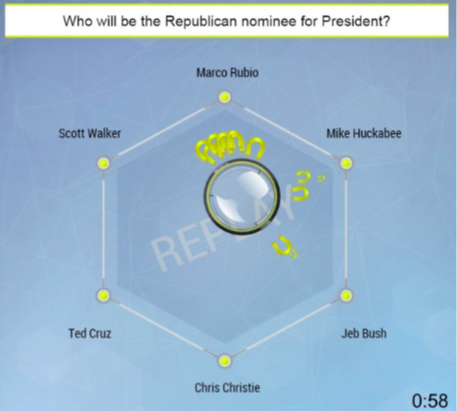
Ниже, на Рис. 2, показан пример вопроса,
который показывается одновременно на
экранах всех юзеров в рое. Конкретно в
этом опыте, группе из 90 юзеров задаётся
политический вопрос, пробуждающий
разнообразные мнения: «Что должно
быть главным приоритетом для Конгресса?».
Было предложено 6 вариантов ответа.
Варианты могут предоставляться задающим
вопрос, либо, при использовании «режима
предложений», могут быть предложены
участниками роя. Возможность участников
роя предлагать варианты ответа имитирует
процесс у пчёл, которые, как известно,
предоставляют варианты для расположения
их колонии.

Рис. 2. Снимок из
повтора: человеческий рой отвечает на
вопрос.
После того как вопрос и варианты ответов
показаны на экране всем участникам роя,
появляется курсор в центре экрана.
Обратный отсчёт 3, 2, 1 координирует
всех юзеров для начала переговоров. Рой
быстро начинает действовать, синхронно
направляя курсор к предпочитаемому
ответу. По большому счёту, процесс
принятия решения – это сложные переговоры,
в которых индивиды меняют свои мнения
несколько раз, чтобы выйти из тупиковых
ситуаций и противостоять опциям, которые
им не нравятся. Когда юзер тянет курсор
в сторону одного из ответов, один из
компонентов их силы также действует
как помеха движению курсора к конкурирующим
ответам. Таким образом, юзеры не только
поддерживают решение, к которому они
тянутся, но и действуют против решений,
которые им не нравятся. Это обеспечивает
двойной процесс, наблюдаемый в естественных
роях и неврологических мозгах, где
каждый агент имеет возможность и
возбуждения и торможения [4],
таким образом снижая вероятность
тупиковых ситуаций.
За последние 18 месяцев были рассмотрены
сотни человеческих роев, ответившие на
тысячи вопросов подобным образом [10,
11]. В случае, если с самого начала
вопроса у группы есть выраженное согласие
насчёт одного из ответов, курсор плавно
движется к нему. Но если же 2 или более
вариантов имеют значительную поддержку
– а это имеет место для большинства
вопросов которые имеет смысл задавать
группе, - рой в качестве единой системы
совершает сложные переговоры, во время
которых индивиды часто меняют свою
стратегию по несколько раз. Большинство
юзеров начинают с того, что тянут в
сторону ответа, который нравится им
больше всего. Но затем они корректируются,
если курсор начинает движение к ответу
который им очень не нравится. Юзеры
меняют угол своего действия: они не
тянут к ответу который им нравится, а
отодвигают курсор от противного им
варианта. Затем юзеры снова корректируются,
чтобы тянуть курсор в сторону своих
предпочтений. Пока все юзеры параллельно
совершают такие динамические изменения,
рой исследует пространство решений, до
тех пор пока не придёт к варианту,
оптимизирующему коллективное
удовлетворение всей группы.
Важно заметить, что юзеры не только
меняют направление своего вклада в
текущий момент, но и силу своих намерений.
Чем ближе юзер ставит свой магнит к
курсору, тем сильнее он тянет – как и
происходило бы с настоящим магнитом.
Поскольку курсор постоянно двигается,
юзеры должны всё время двигать свои
магниты, чтобы оставаться ближе к
курсору. Это важно, т.к. требует от юзеров
активного участия на протяжении всего
процесса. Если они перестанут передвигать
свои магниты относительно движущегося
курсора, расстояние будет увеличиваться
и сила воздействия снизится. Таким
образом, подобно пчёлам, исполняющим
танец колебаний или нейронам, посылающим
сигналы активации, взаимосвязанные
юзеры в искусственном человеческом рое
должны постоянно выражать свои меняющиеся
предпочтения на протяжении всего
обсуждения, либо потеряют своё влияние
на итоговый ответ.
Интервью с участниками после тестирования
показали, что очень важно требовать от
юзеров постоянное и активное влияние
на курсор. Юзеры с более твёрдыми мнениями
на счёт одного из ответов были более
бдительны к сохранению максимального
влияния на курсор на протяжении всего
времени. И наоборот, юзеры с менее
решительными мнениями (потому что они
мечутся между несколькими ответами или
потому что они осознают, что обладают
не всей информацией о некоторых
возможностях) были менее настойчивы в
сохранении максимального влияния во
времени. Таким образом, интерфейс для
роя позволяет юзерам выражать свою
меняющуюся поддержку во время коллективного
решения не только за счёт указания
направления к ответу, но и за счёт
выражения степени своей убеждённости.
Вдобавок, юзеры отмечают, что в случае
сомнений или неопределённости, они
становятся более гибкими в смене
предпочтении для избегания тупиковых
ситуаций, чем были бы имея твёрдые
убеждения относительно одного из
ответов. Мы считаем, что данная динамика
процесса роения обеспечивает оптимизацию
общего удовлетворения группы с учётом
разброса уровней убеждённости.
Наблюдения и интервью после тестирования
также показывают, что человеческие рои
приходят к стабильным решениям независимо
от пространственного расположения
ответов. Например, если два приоритетных
ответа расположены на противоположных
сторонах от начальной позиции курсора,
рой быстро попадёт в тупиковую ситуацию,
борясь за один из них. Наоборот, если
два приоритетных ответа расположены с
одной стороны от начального положения
курсора, рой не попадёт сразу же в
тупиковую ситуацию, а пододвинет сначала
курсор к этим двум вариантам. Тем не
менее, тупик произойдёт, когда курсор
окажется между двумя приоритетными
ответами. В таком случае, рой исследует
пространство решений, которое может
иметь различное расположение, но приходит
к тому же результату. Схожая устойчивость
наблюдалась у пчелиных роев, которые,
как известно, принимают решение об
оптимальном расположении независимо
от того, в каком порядке пчёлы разведчики
обнаруживают возможные локации и
сообщают о них [9].
Снова обратимся к Рис. 2: дефолтным
представлением используемым в платформе
является набор из 6-ти вариантов,
расположенных в шестиугольнике.
Шестиугольник выбран, поскольку по
результатам социальных исследований,
люди эффективно принимают решения, если
им предоставлено не более 6-ти вариантов,
но страдают от возрастающей неэффективности
при «избытке возможностей» когда
вариантов больше [12]. Чтобы
обеспечить работу роя с более
многочисленными множествами вариантов,
система применяет итеративный подход,
предоставляя юзерам серию с 6-ти
вариантными подмножествами, а затем
сравнивая победившие варианты между
собой. Это позволяет найти решение среди
большего множества вариантов. Единственным
исключением являются ответы из
непрерывного множества, например, при
выборе значения от 0 до 1000. Для поддержки
таких вопросов, платформа предлагает
юзерам расположить курсор на непрерывной
шкале. Таким образом, рой может совместно
принимать решения о количествах, ценах,
процентах, шансах и других численных
характеристиках внутри заданных
диапазонов.
Пример вопроса со шкалой представлен
на Рис. 3. В этом примере рою юзеров нужно
принять решение о честной цене на билет
в кино на шкале от $0 до$25. Используя такое
представление, курсор стартует в центре
шкалы и может плавно двигаться в обоих
направлениях. В таких видах коллективных
решений, рой как правило перескакивает
итоговый ответ, затем меняет направление
движения курсора, колеблясь во всё более
узких пределах, пока юзеры параллельно
корректируют свои силы. Ответ выбирается
на непрерывной шкале, когда курсор
задержится на одном значении на более
чем пороговый промежуток времени
(например, 3 секунды).

Рис. 3. Пример
представления человеческого роя на
шкале ответов
Ограничение Времени: выбирая ли
ответ на непрерывной шкале или из набора
дискретных вариантов, каждый рой юзеров
был ограничен во времени – 60 секундчтобы принять решение. По прошествии
этого времени, кончается процесс принятия
решения и считается что попытка окончена.
Это ограничение во времени применяется
по двум причинам. Во-первых, это накладывает
на группу Дилемму Заключённых: с
истечением времени индивиды всё меньше
тянутся к ответам, принятие которых
маловероятно. Целью является повышение
гибкости, повышение вероятности того,
что рой придёт к общему мнению. Во-вторых,
социально-научные исследования
показывают, что люди вероятнее выражают
честные и бескорыстные ответы, когда
отвечают при временном ограничении. И
наоборот, люди склонны подвергаться
влиянию предварительных мнений и
корыстных интересов при увеличении
времени [13]. Поскольку
целью данной платформы роения является
выражение коллективного сознания
населения, сбор честных и бескорыстных
ответов упрощает выявление истинных
намерений группы.
Сбор Данных: для поддержки исследования
человеческих роев, база данных собирает
Векторы Намерений Юзера для каждого
члена роя на протяжении временных
отрезков каждого решения. Векторы
сохраняются каждые 0,25 секунд, начиная
с момента когда курсор может начать
движение, и заканчивая когда ответ
выбран группой. Хотя исходные данные и
являются весьма полезными, особый
интерес вызывает изучение возникновения
и исчезновения подгрупп внутри роя,
каждая из которых тянет к избранной
альтернативе, подавляя неприятные им
варианты. Мы называем каждую подгруппуфракцией и разработали технику,
называемую «фракционный анализ» для
отслеживания и визуализации динамики
подгрупп во время принятия каждого
решения. Это особенно полезно для
определения того, появится ли и если да
то когда именно, достаточный кворум и
продлится ли он достаточно долго, чтобы
привести курсор к коллективному решению.
Ниже, на Рис. 4 показан вопрос, каким он
был представлен группе голосующих в
начале 2015г, сразу после того, как несколько
кандидатов от Републиканской партии
объявили о своём намерении быть
номинированными в президенты. Как бывает
во многих политических вопросах, это
повлекло за собой множество конфликтующих
мнений. Тем не менее, работая вместе как
единый рой, группа пришла к варианту
«Джеб Буш» всего за 31
секунду.
.
Рис. 4. Человеческий
рой выбирает 1 из 6 кандидатов в президенты.
В то время как итоговый ответ отражает
коллективную волю роя, полезно изучить
как он был достигнут. В данном случае,
сначала курсор выдвинулся к Марко Рубио,
едва не выбрав этот вариант, но затем
движение развернулось, когда обороняющиеся
фракции объединились, чтобы отодвинуть
курсор. Такое поведение часто встречается
в решениях, принимаемых роем: оно
проявляется, когда юзеры меняют свою
стратегию при приближении курсора к
неприятному им варианту. Когда все юзеры
совершают подобные изменения параллельно,
сложные переговоры приводят к решению,
к которому склоняется вся система.
Фракционный анализ, показанный на Рис.
5 показывает визуальное представление
переговоров, имевших место в данном
решении.
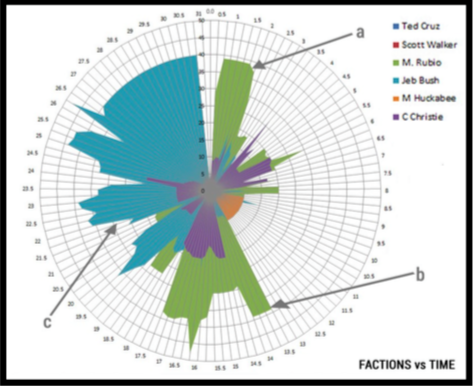
Рис.
5. Пример Фрикционного Анализа принятия
решения роем в реальном времени.
На Рис. 5, каждая цветная зона на графике
радиального распределения представляет
изменяющуюся во времени поддержку
фракциями одного из шести вариантов
ответа. График нужно рассматривать по
часовой стрелке от постановки вопроса
(t=0 сек) до достижения
ответа (t=31 сек). Радиальная
высота каждой цветной зоны представляет
суммарную силу, применяемую участниками
роя, тянущими к определённому варианту
в определённый момент времени. Это
представление наглядно показывает, что
множество фракций возникали и исчезали
на протяжении поиска решения, отражая
сложные переговоры внутри роя.
Хороший способ читать график Фрикционного
Анализа – начать с t=o и
продолжать по часовой стрелке. Так, мы
видим, что быстро сформировалась фракция
в поддержку варианта Марко Рубио. Это
зелёная зона, обозначенная (a)на графике. В это время курсор быстро
двигался к варианту Рубио, практически
выбрав его. Но поскольку это динамическая
система в реальном времени, формирование
решения оказывает воздействие на всю
группу юзеров. Таким образом, рой юзеров
видит как курсор приближается к варианту
в реальном времени, и те кто до этого не
определился, часто начинают тянуть к
другим опциям. В то же время, те кто тянул
курсор к другим вариантам, могут изменить
свою стратегию и защищаться от формируемого
ответа. Интервью после принятия решений
показывают, что процесс роения имеет
уникальный положительный эффект:
стимулирование участников осознавать
свои истинные чувства по мере того, как
они видят появление возможного ответа.
Например, они возможно не осознавали
на сколько сильны их чувства за или
против варианта Рубио, пока не увидели
как это решение появилось перед ними.
Как только курсор начал удаляться от
Рубио, поддержка фракции, изображаемой
зелёной зоной (a) на графике,
быстро исчезла и последовал период
переговоров и тупик (с t=2 доt=13), в это время не было
явных фракций. Как показывает зелёная
зона (b), другая фракция
поддерживающая Рубио появилась примерно
в t=13,5. Фракция снова
исчезла и новая значимая фракция
образовалась для поддержки Джеба Буша
в t=18. Фракция Джеба Буша
сохраняла силу на протяжении сессии и
курсор достиг цели, принимая коллективное
решение «Джеб Буш».
Во время интервью большинство участников
утверждают, что чувствовали согласие
с итоговым ответом: не обязательно из-за
того, что он совпал с их изначальным
мнением, но и из-за того, что они активно
участвовали в процессе, направляя своё
влияние во время всего поиска решения.
Они противопоставляют это голосованиям,
где чувствуют себя менее значимыми. Для
количественной оценки этих чувств,
провели опрос 48-ми студентов, участвовавших
в роях. Несмотря на то, что каждый из них
контролировал всего 1 из 48-ми магнитов,
работающих вместе для движения курсора,
только 4 из 48 опрошенных не согласились
с утверждением «Я чувствовал себя
значимым членом группы». Аналогично,
только 5 из 48 опрошенных не согласились
с утверждением «Процесс мотивировал
меня найти общее мнение». Это воодушевляющий
отклик, показывающий, что процесс
человеческого роения – это позитивный
опыт для юзеров.
-
ФУНКЦИОНАЛЬНОЕ
ТЕСТИРОВАНИЕ
Для тестирования интеллекта человеческих
роев, был проведён ряд исследований
используя платформу UNU. Для
первого теста была случайным образом
набрана группа юзеров, которым нужно
было сделать предсказание о проверяемом
событии: премия «Оскар» в 2015г. Вторая
набранная группа юзеров должна была
оценить вес коровы. В обоих случаях
результаты полученные в синхронных
роях сравнивались с асинхронным базовым
вариантом – традиционным онлайн опросом.
Поскольку голосования и опросы являются
наиболее широко используемыми методами
для выражения «мудрости толпы», эти
исследования позволили сравнить
асинхронные толпы и синхронные рои.
Организация Исследования Предсказаний:Группу юзеров попросили предсказать
победителей Премии «Оскар» в 2015г, чтобы
протестировать способность человеческих
роев к предсказаниям [11].
В группе приняли участие онлайн 48
индивидов, каждый из них заполнил
традиционный опросник для предсказаний
победителей в 15-ти категориях. Таким
образом были получены базовые предсказания
от индивидов, работающих изолированно.
Для тестирования роя, из всей группы
была случайным образом выбрана подгруппа
из 7-ми человек. Им дали задание сделать
такое же предсказание в качестве роя,
используя платформу UNU. Эти
индивиды взаимодействовали через
стандартное интернет подключение к
центральному серверу. Участники подгруппы
могли взаимодействовать друг с другом
исключительно посредством интерфейса
роя. Обзор результатов голосований этих
7-ми индивидов подтвердил, что они были
типичными участниками письменных
голосований.
Результаты Исследования Предсказаний:Результаты голосования всей базовой
группы из 48 человек показали, что по
одиночке участники в среднем дают 6
верных предсказаний о победителях в
15 категорий (успех 40%). Если
посмотреть на самые популярные
предсказания в группе, как в наиболее
широко используемом методе объединения
данных "Мудрость Толпы”, то получается7 верных предсказанийв 15 категориях (успех 47%).
Работая как единый рой,
подгруппа из 7-ми человек достигла 11
верных предсказаний в
15 категориях (успех 73%). Другими
словами, подгруппа составляющая всего
15% всей группы, работая
как синхронная система, показала
практически вдвое более успешные
результаты. Кроме того, единый рой сделал
больше верных предсказаний, чем 47 из 48
участников голосования. Это многообещающий
результат, который говорит о потенциале
роев в реальном времени для использования
мудрости онлайн групп.
В качестве базового показателя, эксперты
Нью Йорк Таймз сделали аналогичные
предсказания по поводу Премии «Оскар»
2015. Эти эксперты обладали гораздо более
глубокими знаниями, чем новички из
нашего исследования. Тем не менее,
предсказания Блога Нью Йорк Таймз
оказались верны лишь на 55%.1 Другими словами,
предсказания от группы новичков,
совместно работающих в человеческом
рое, обошли экспертов в этой области.
Хотя и не являясь неоспоримым, это
пилотное исследование показывает, что
человеческий рой может быть инструментом
для достижения выводов экспертного
уровня группами не-экспертов.
Организация Исследования
Оценки: В 1906г Фрэнсис
Галтон проводил классическое исследование
"Мудрости Толпы” на английской ярмарке,
где фермеры принимали участие в
соревновании по оценке веса крупного
быка. В общей сложности 787 человек
предложили свои оценки веса. Галтон
подсчитал статистическое среднее.
Получилось 1198 фунтов. Действительный
вес составлял 1197 фунтов. В то время как
большинство догадок были весьма далеки
от истины, статистическое среднее
значение от толпы оказалось удивительно
точным. Спустя более 100 лет, Национальное
Общественное Радио (НОР) повторило это
классическое исследование, предложив
слушателям оценить вес коровы по
фотографии выложенной онлайн.2Это более сложное задание, т.к. судить
по фотографии сложнее чем вживую. Было
получено 17205 оценок. Поскольку НОР
предоставило фотографию и массивный
набор данных, это современное исследование
было выбрано в качестве базового
результата для сравнения оценок,
сделанных толпами и роями.
Чтобы проанализировать способность
человеческих роев давать разумные
оценки, случайным образом набрали группу
из 49 юзеров и попросили посмотреть
онлайн на фотографию коровы, использованную
в исследовании НОР. Затем их попросили
предсказать вес коровы в фунтах. Сначала
юзеры работали индивидуально, вводя
свои оценки в онлайн опросе. Затем юзерам
нужно было оценить вес коровы, работая
совместно в рое. Для этой оценки юзеры
сначала вместе передвигали графический
курсор на шестиугольной схеме, в которой
было представлено 6 диапазонов значений.
Затем курсор передвигали по шкале, где
можно было выбрать значение с точностью
до 5 фунтов.
Результаты Исследования Оценки: По
результатам голосования, статистическое
среднее оценок, полученных от 49 индивидов
составила 1137 фунтов. Отклонение от
действительного веса коровы составило
16,1% (1355 фунтов). Те же самые
юзеры, работая вместе в рое, предсказали,
что вес коровы равен 1250 фунтов. Отклонение
от действительного веса составило всего
7,7%. Другими словами, тот
же набор юзеров дали в 2 раза более точную
оценку, работая как синхронная система,
по сравнению с асинхронным статистическим
средним. Это укрепляет идею, что синхронный
человеческий рой может быть более
эффективным, чем асинхронное голосование,
для использования группового интеллекта.
В исследовании НОР были собраны
асинхронные данные от внушительного
числа юзеров – 17205 человек. Статистическим
средним их предсказаний было 1287 фунтов,
что всего на 5% отклоняется
от действительного веса коровы. Данный
результат голосования был более точный,
чем у человеческого роя, но разница в
предсказаниях неожиданно мала, учитывая
несоразмерность задействованных групп.
Рой из 49 синхронно действующих юзеров
выдал оценку, которая всего на 37 фунтов
отличается от предсказания, сделанного
17205 проголосовавшими респондентами.
Это наводит на мысль, что рои потенциально
более эффективны чем толпы, поскольку
выдают сильные результаты, задействуя
лишь малое число людей. Будущие
исследования должны определить
оптимальный размер роя.
-
ОБСУЖДЕНИЯ
И ВЫВОДЫ
Действительно ли рои умнее, чем толпы?
Согласно пилотным исследованиям, хотя
голосование большой толпой и является
мощным способом для замера средних
взглядов населения, но не имея обратной
связи в реальном времени, голосование
не даёт группам исследовать пространство
решений и прийти к общему мнению. В самом
деле, голосование в основном является
«поляризацией», поскольку отражает
изолированные мнения участников групп
и подчёркивает уже существующие отличия
внутри населения, не предоставляя
никаких явных инструментов для достижения
компромисса. В итоге, голосование может
способствовать укоренению мнений, даже
когда участники готовы поддержать
разные варианты.
Напротив, рои сплачивают группы, позволяя
участникам вести синхронные переговоры
и адаптироваться по мере возникновения
решения в реальном времени. Участники
роя не выражают статичные взгляды, а
постоянно анализируют и пере-анализируют
свои собственные убеждения с учётом
всех возможных результатов, взвешивая
уверенность в себе и свои предпочтения.
Все участники делают это параллельно,
так что рой может быстро прийти к решению,
которое отражает коллективную волю
группы. Мы считаем, что именно поэтому
рои способны эффективно запечатлеть
коллективную мудрость группы.
Конечно, нам также стоит поразмыслить,
почему найденная коллективная мудрость
группы представляет более точные
результаты, чем у большинства индивидуальных
участников. Наблюдения и интервью после
тестирования выявили 2 возможности: (а)смешение знаний и (б) смешение
находчивости. Что касается первого:
когда участникам нужно принять решение,
имея неполные знания, процесс роения
позволяет участникам восполнить пробелы
в знаниях друг друга, чтобы цельная
система могла принять разумное решение.
Это было наиболее наглядно в предсказании
о Премии «Оскар» 2015. Все участники
заявили, что видели не все фильмы,
большинство заявили что видели всего
несколько. И тем не менее, совместно
работая как единый рой, группа смога
восполнить пробелы и сделать точные
предсказания.
Что касается находчивости: в экономике
и психологии широко известно, что когда
индивиды сталкиваются с выбором,
содержащими множество альтернатив, и
в каждой из них нужно оценить многочисленные
параметры, они прибегают к упрощённой
эвристике, или находчивости, чтобы
задача была выполнима. В случае Премии
«Оскар», некоторые юзеры полагались на
«суматоху в СМИ» вокруг определённых
фильмов, в то время как другие основывались
на своём восприятии кассовых успехов,
наличии известных актёров/режиссёров,
или личном удовольствии от фильма. В то
время как находчивость отдельного
юзера, вероятно, не смогла бы дать точные
результаты (поскольку это чрезмерно
упрощённый метод для предсказания),
процесс роения помог юзерам успешно
объединить свою индивидуальную
находчивость. Возможно, это произошло
благодаря тому, что юзеры не только
объединили свою находчивость, но и
взвешивали свой вклад, основываясь на
своей уверенности и убеждениях.
Благодаря тому, что потенциал человеческого
роения даёт возможность группам
объединять свои знания и находчивость,
возможно, роение даёт величайшее
преимущество когда группе нужно принять
сложное решение в области, где
индивидуальные знания ограничены и
стоит выбор между несколькими вариантами,
у каждого из которых имеется ряд
характеристик влияющих на решение. Не
удивительно, что это как раз тот тип
задач, для которого развивалось роение
у пчёл. Когда пчелиные рои выбирают
место для колонии, они в среднем
рассматривают 24 разные локации, и каждая
оценивается по крайней мере по 6-ти
независимым характеристикам. Несмотря
на сложность задачи, зафиксировано, что
пчёлы почти всегда достигают практически
оптимальных решений [9].
Далее,
нашей целью будет оценка, могут ли
человеческие рои достигать таких же
оптимальных решений, сталкиваясь со
сложными задачами. В частности, нас
интересует, могут ли решения роя принести
большее групповое удовлетворение, чем
традиционные голосования. Кроме того,
платформа UNU доступна для всех академических
исследователей, желающих провести свои
эксперименты. Чтобы запросить доступ,
посетите www.unanimousai.com.
Благодарность: Unanimous A.I. спонсировали
данное исследование, при поддержке
Калифорнийского Государственного
Университета (Кэл Поли, Сан Луис Обиспо).
Особое спасибо Дэвиду Балтексу за вклад
в процесс тестирования.
Ссылки
[1]
Lev Muchnik, Sinan Aral, Sean J. Taylor. Social Influence Bias:
A Randomized Experiment. Science, 9 August 2013: Vol. 341 no. 6146
pp. 647-651
[2]
Ottaviani, Marco, and Peter Norman Sørensen. "Aggregation
of information and beliefs in prediction markets." London
Conference on Information and Prediction Markets. 2007.
[3]
Beni, G., Wang, J. Swarm Intelligence in Cellular Robotic
Systems, Proceed. NATO Advanced Workshop on Robots and Biological
Systems, Tuscany, Italy (1989).
[4]
Seeley, Thomas D., et al. "Stop signals provide cross
inhibition in collective decision-making by honeybee swarms."
Science 335.6064 (2012): 108-111.
[5]
K.m. Passino, T.F. Seeley, P.K. Visscher, Swarm Cognition in
honeybees, Behav. Ecol. Sociobiol. 62, 401 (2008).
[6]
J.A.R. Marchall, R. Bogacz, A. Dornhaus, R. Planque, T.Kovacs,
N.R. Franks, On optimal decision making in brains and social insect
colonies, J.R. Soc Interface 6,1065 (2009).
[7]
I.D. Couzin, Collective Cognition in Animal Groups, Trends
Cogn. Sci. 13,36 (2008).
[8]
Seeley, Thomas D., Visscher, P. Kirk. Choosing a home: How the
scouts in a honey bee swarm perceive the completion of their group
decision making. Behavioral Ecology and Sociobiology 54 (5) 511-520.
[9]
Seeley, Thomas D. Honeybee Democracy. Princeton University
Press, 2010.
[10]
Rosenberg, L.B, "Human Swarms, a real-time paradigm for
collective intelligence.” Collective Intelligence 2015, Santa Clara
CA.
[11]
Rosenberg, L.B., "Human Swarms, a real-time method for
collective intelligence.” Proceedings of the European Conference on
Artificial Life 2015, pp. 658-659
[12]
Scheibehenne, Benjamin, Rainer Greifeneder, and Peter M. Todd.
"Can there ever be too many options? A meta-analytic review of
choice overload." Journal of Consumer Research 37.3 (2010):
409-425.
[13]
Rand, Greene, Nowak, "Spontaneous Giving and Calculated
Greed”, Nature, Sept 2012, VOL 489, pp 427 – 430.
СНОСКИ
1 https://carpetbagger.blogs.nytimes.com/2015/02/19/oscars-2015-the-carpetbaggers-predictions/
2http://www.npr.org/sections/money/2015/08/07/429720443/17-205-people-guessed-the-weight-of-a-cow-heres-how-they-did
Луис
Розенбергполучил степени бакалавра, магистра и
доктора наук в Стенфордском Университете.
Его докторская работа о взаимодействии
человека с компьютером была спонсирована
Лабораторией Армстронга ВВС США и её
результатом стала платформа VirtualFixtures(1992)- первая система Дополненной Реальности
с эффектом присутствия. Затем Розенберг
основал Immersion
Corporation - открытое
акционерное общество, занимающееся
виртуальной реальностью, в частности
продвинутыми интерфейсами. Недавно он
основал Unanimous
A.I. –
компанию занимающуюся взаимодействием
человека с компьютером, с фокусом на
использование коллективного разума
благодаря человеческим роям
*перевод ОКО ПЛАНЕТЫ при цитировании и копировании ссылка на ОКО ПЛАНЕТЫ как первоисточник перевода обязательна
Рейтинг публикации:
|












