У министерства обороны США есть собственный венчурный фонд. Он инвестировал в Кремниевую долину (и не только) с начала 1960-х годов и помог создать компьютерную мышь, интернет, GPS и даже Siri.
Аббревиатура DARPA расшифровывается как Defense Advanced Research Projects Agency, или Управление перспективных исследовательских проектов министерства обороны США. Оно было основано по приказу президента США Дуайта Эйзенхауэра в 1958 году — после запуска первого советского спутника.
Сначала DARPA систематизировало исследовательские проекты других ведомств — например, собрало все гражданские космические проекты и передало их NASA, — а затем начало само искать и финансировать прорывные технологии.
Название агентства несколько раз менялось с DARPA на ARPA и обратно: в него то добавляли слово Defense («оборона»), то снова его убирали. DARPA занимались как военными проектами — например, стелс-технологиями или лазерным оружием, — так и мирными: автономными автомобилями или сбором космического мусора.
В отличие от большинства других госорганов, DARPA не подчиняется строгим требованиям отчётности — например, не попадает под Закон об оптимизации федеральных закупок (Federal Acquisition Streamlining Act). Поэтому агентство может распоряжаться государственными деньгами свободно — как венчурный фонд.
В своём манифесте агентство заявляет, что готово к неудачам и рассчитывает, что лишь малая часть проектов окажется успешной, зато этот успех позволит оправдать все остальные инвестиции. При этом, в отличие от венчурных фондов, DARPA не требует за свои инвестиции долю в капитале: его цель — развивать экосистему инноваций в стране.
Глубокие карманы, терпение, очень долгосрочная стратегия и отсутствие желания захватить контроль над компанией — всё это делает DARPA мечтой любого стартапера.
В 2020 году бюджет DARPA составил $3,56 млрд — как у крупных венчурных фондов. Сейчас у DARPA около 250 проектов. Ниже — несколько самых заметных технологий, над которыми работало ведомство.
ARPANET: предшественник интернета
Компьютер IBM 360/195 (1971). Такой стоял в Университете Калифорнии в Санта-Барбаре и был подключён к ARPANET
В 1960-х годах вычислительные мощности были в дефиците, а для передачи информации приходилось ездить между городами или отправлять посылки с перфокартами. Поэтому ARPA поручило учёным разработать компьютерную сеть, по которой можно было бы обмениваться информацией и пользоваться компьютерами других университетов.
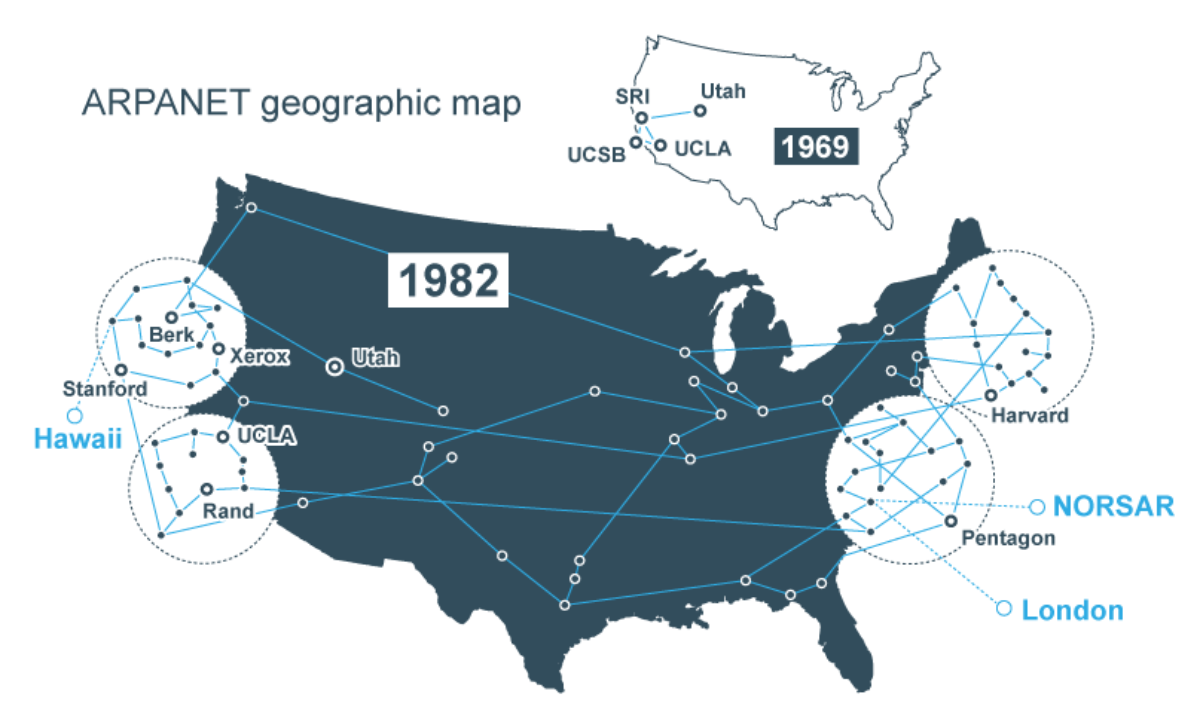
Первое испытание сети, получившей название ARPANET, состоялось в 1969 году. Учёные из Калифорнийского университета попытались передать в Стэнфордский сообщение со словом LOGIN. Университеты разделяло более 500 км, соединение прерывалось, и с первой попытки передать удалось только часть слова — «LO.».
В 1973 году к сети подключились первые европейские компьютеры. Перед ARPA встала задача: нужно было сделать ARPANET совместимой с другими сетями, которые начинали появляться в других странах. Старый протокол NCP не мог решить эту проблему. По заказу DARPA исследователи разработали протокол TCP/IP, на котором работает и современный интернет.
Карта сети ARPANET в 1969 и 1982 годах
В 1983 году ARPANET разделили на две сети: исследовательскую, сохранившую старое название, и закрытую военную MILNET.
Тем временем стали появляться и другие, более широкие и общедоступные проекты: например, сеть NSFNET, объединившая компьютеры американских университетов (и впоследствии ставшая основой для гражданской интернет-инфраструктуры США), и концепция Всемирной паутины.
В 1990 году ARPANET была закрыта. Всего DARPA вложило в собственную сеть $25 млн.
Первая компьютерная мышь, видеоконференции и гипертекст
Первый прототип мыши в Музее истории компьютеров
В 1945 году инженер и исследователь Вэнивар Буш написал эссе «Как мы можем думать», где размышлял о технологиях будущего, которые бы дополняли человеческий интеллект — например, о системах индексирования информации и гипертексте. По его задумке этими проектами могли заняться учёные, которые остались без работы после закрытия военных проектов.
Вдохновившись этим эссе, изобретатель Дуглас Энгельбарт в 1962 году представил доклад «Дополнение человеческого интеллекта: концепция» (Augmenting Human Intellect: A Conceptual Framework), где описал компьютер с визуальным дисплеем, управляемый с помощью клавиатуры и «других устройств». Этот доклад заинтересовал DARPA. Энгельбарт получил грант и открыл Центр исследований улучшения человеческого интеллекта (или просто ARC).
Одним из этих «других устройств» стала мышь. Энгельбарт старался приспособить планиметр (инструмент для измерения площади двумерных объектов) для управления курсором на экране.
В ноябре 1963 года он описал прибор под названием «жук» (bug), который позже стал называться мышью. Это была коробка с двумя перпендикулярными колёсиками, которые отмеряли расстояние на столе. При движении мыши колёса катились по поверхности, а вслед за ними перемещался курсор на экране.
У мыши были свои преимущества: например, в отличие от стилуса, она могла просто стоять на столе и не падала, когда её никто не держал. Первый прототип прибора Энгельбарт собрал в 1964 году.
Результатом работ ARC за первые несколько лет стала платформа для совместной работы на одном компьютере oN-Line System. Физически NLS представляла собой рабочую станцию из монитора, мыши и так называемой аккордовой клавиатуры.
К одному компьютеру можно было подключить до 16 рабочих станций. Программы NLS позволяли редактировать тексты (в том числе параллельно), сортировать информацию — например, с помощью гиперссылок — и проводить презентации.
«Мать всех презентаций». По данным Wired, она обошлась DARPA в $175 тысяч
Презентация самой NLS прошла в 1968 году. Впоследствии её прозвали The Mother Of All Demos — «мать» или «царица всех презентаций», — потому что за полтора часа на ней были впервые представлены все вышеперечисленные технологии, ставшие прообразами современных компьютеров.
В начале 1970-х многие сотрудники ушли из ARC в Xerox и разработали компьютер Xerox Alto — первый компьютер с графическим интерфейсом. А в 1978 году институт Энгельбарта продал NLS частной компании Tymshare, и та тоже вышла на рынок. Но система была сложной в освоении — например, пользователям приходилось заучивать комбинации клавиш на аккордовой клавиатуре, — поэтому не получила широкого распространения.
В 1990-е DARPA выделило Энгельбарту ещё один грант на то, чтобы перевести NLS в более современный вид. Институт его имени использует систему в своей работе до сих пор. Посмотреть на её разные версии можно на сайте института.
Shakey: первый робот с логическим мышлением
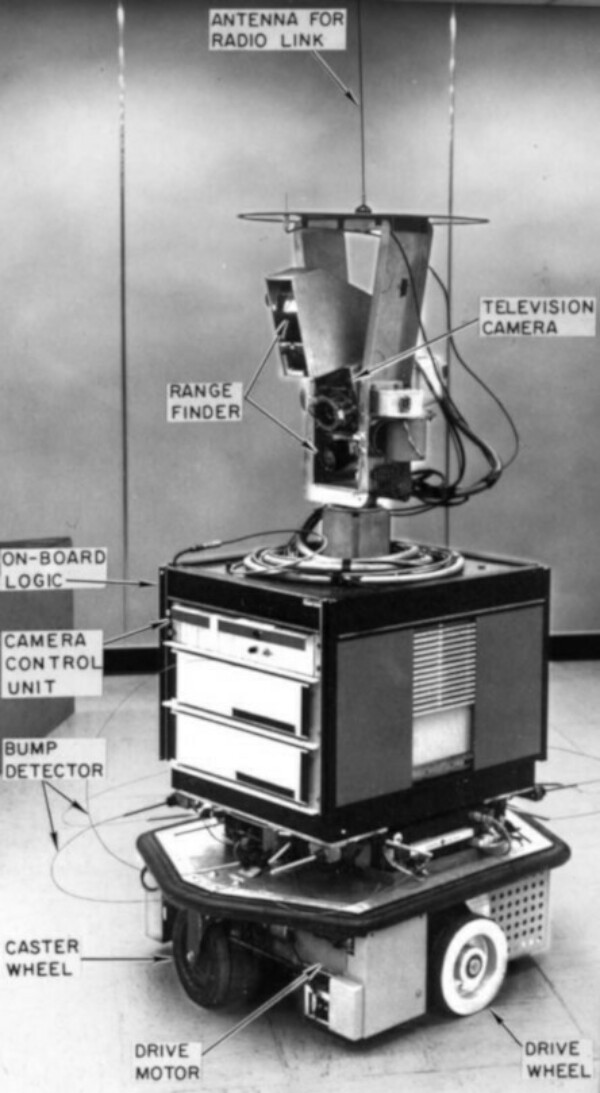
Робот Shakey и его составные части
Shakey — первый робот, который работал с технологиями искусственного интеллекта. Концепцию робота придумал Чарльз Розен, глава исследований ИИ в Стэнфордском исследовательском институте (SRI).
В 1964 году SRI подал в ARPA заявку на исследование «умных» автоматов. Целью проекта было «создание машин, способных выполнять задачи, которые, как сейчас принято считать, требуют человеческого интеллекта». ARPA удовлетворило заявку и выдало грант на $750 тысяч — и в 1966 году SRI начал работу над роботом. Изначально учёные планировали, что робот будет выполнять военные цели, например, работать разведчиком.
Своё имя Shakey получил за то, что всё время трясся. Двухметровый робот был оснащён видеокамерами, сенсорами столкновения и дальномером. Он связывался с компьютером по радио: отправлял собранные данные и получал в ответ указания. Shakey понимал тексты на естественном языке: например, мог расшифровать предложение «столкни ящик с платформы» и выполнить команду.
Фильм о Shakey (1969)
В 1969 году команда SRI сняла о Shakey фильм, показав некоторые из экспериментов с роботом. Например, когда робот уже подъезжал к ящику и был готов его толкнуть, учёный в чёрной мантии подбегал и отодвигал ящик в сторону.
В 1970 году о роботе написал журнал Life. Подзаголовок статьи звучал как «Невероятная и пугающая реальность: машина с собственным разумом». Автор статьи, Брэд Дэррач, взял интервью у учёного Марвина Мински. Тот предсказывал, что уже к середине семидесятых роботы сравняются по интеллекту с людьми, а затем и превзойдут их.
«Когда компьютеры возьмут над нами превосходство, мы его уже не вернём. Наша жизнь будет зависеть от их попустительства. Нам повезёт, если они решат оставить нас в живых в качестве домашних животных».
Этого не случилось, но Shakey повлиял на развитие робототехники — на него ссылаются более 2000 патентов.
GPS
Принцип работы спутников GPS. Приёмник на Земле определяет своё местоположение, измеряя сдвиг Доплера
После запуска первого советского спутника американские учёные обнаружили, что благодаря эффекту Доплера (то есть изменению длины и частоты волны в зависимости от относительной скорости их источника) спутник позволяет точно определять координаты на Земле.
Первая навигационная система, описанная на этих принципах, появилась в 1959 году — её разработали DARPA и Институт Джонса Хопкинса. Она называлась Transit, или NAVSAT, и была создана для военно-морского флота США (в первую очередь для подводных лодок), но в 1967 году стала доступна и для гражданских судов. Transit позволяла определить местоположение судна с точностью до 30 метров, если оно стояло на месте.
В начале 1970-х власти США решили объединить преимущества разных навигационных и спутниковых систем в одну: помимо Transit, в стране действовали системы 621B (способная определять трёхмерные координаты), Timation (система точного времени) и SECOR (спутники для точных геодезических измерений).
Поэтому над объединённой системой, получившей название GPS (Global Positioning System, «Глобальная система позиционирования»), работало множество государственных структур — в том числе флот, воздушный флот, армия и NASA — и частных компаний, например General Electric. Первый спутник GPS запустили в 1973 году.
Миниатюрный GPS-приёмник
Но первые портативные GPS-приёмники были слишком тяжёлыми, например, модель PSN-8 Manpack весила 8 килограммов. В 1983 году DARPA по заданию Морской пехоты США начали работу над новыми, миниатюрными приёмниками. Приёмники были похожи по размеру на пачку сигарет, за что и получили название Virginia Slims.
Aspen Movie Map: предшественник Google Street View
Как работала Aspen Movie Map
В 1976 году израильский спецназ провёл успешную операцию «Энтеббе», освободив заложников из аэропорта Энтеббе в Кампале, столице Уганды. Для подготовки к операции спецназовцы построили частичную копию аэропорта — так что, впервые прибыв в Кампалу, они уже ориентировались на местности.
DARPA предположило, что создавать такие объекты в виртуальной реальности будет дешевле и быстрее. Для пробы учёные из Массачусетского технологического института создали виртуальную копию города Аспен, штат Колорадо.
По городу проехала машина, делавшая снимки каждые три метра. Затем учёные составили из этих статических снимков панораму, по которой можно было ехать, нажимая на кнопки — почти как по современному Google Street View. Кроме того, некоторые здания можно было выделить, чтобы получить о них дополнительную информацию — например, снимки интерьеров или запись разговоров с местными жителями.
DARPA Grand Challenge: гонка автономных автомобилей
Нарезка лучших моментов из гонки DARPA Urban Challenge, 2007 год
Автономные роботы и самоходный транспорт были одной из первых целей DARPA.
В 1980-х DARPA запустило Стратегическую вычислительную инициативу (SCI): проект на миллиард долларов, посвящённый развитию искусственного интеллекта в разных сферах. Разработанные в рамках SCI идеи и технологии — например, сочетание видеокамер и нейронных сетей — легли в основу большинства современных коммерческих автономных автомобилей.
В 2000-х годах DARPA решило провести гонку автомобилей-роботов с призовым фондом $1 млн, чтобы простимулировать развитие этой технологии. На первую гонку в 2004 году подала заявку 21 команда. Шесть из них не смогли пройти даже пробную короткую трассу, ещё две снялись прямо перед основным заездом, а одна машина перевернулась уже на стартовой решётке.
Основная гонка должна была длиться 10 часов, но все автомобили застряли, сломались или разбились намного раньше. Из 240-километровой дистанции победитель (машина Sandstorm от университета Карнеги-Меллон) прошёл только 11,9 км.
Зато в 2005 году уже пять машин прошли всю дистанцию — 212 км, в том числе большой отрезок бездорожья. Условия третьей гонки в 2007 году стали ещё сложнее: машины должны были ехать по городу, соблюдая все правила дорожного движения и взаимодействуя друг с другом на перекрёстках. Приз — $2 млн — достался команде Tartan Racing из того же университета Карнеги-Меллон.
Коммерческого успеха достигла только одна из компаний, чьи машины финишировали в Grand Challenge — TORC Robotics. Её купила компания Daimler, которой также принадлежит Mercedes. На сайте DARPA сказано, что «хотя результаты Grand Challenge непросто выразить в цифрах», сфера автомобилей-роботов процветает, а это и было главной целью проекта.
TOR
Стартовый экран браузера TOR
TOR — cистема прокси-серверов, призванная защищать пользовательские данные и обеспечивать анонимность. Она основана на принципе луковой маршрутизации: сообщения передаются между узлами по непредсказуемому маршруту и в зашифрованном виде, причём на каждом узле добавляется новый слой шифрования. Луковая маршрутизация не гарантирует полной защиты, но сильно усложняет перехват сообщений и деанонимизацию.
Многие сайты TOR cодержат нелегальную информацию. Но луковую маршрутизацию разработали в 1997 году DARPA и Научно-исследовательское управление ВМС США. Вот как это объясняет один из разработчиков луковой маршрутизации Майкл Рид:
Задача, которая привела к изобретению луковой маршрутизации, звучала так: «Можем ли мы создать такую систему двусторонней связи в интернете, чтобы в ней нельзя было определить отправителя и получателя, если информацию перехватят на середине пути?».
Такая система была нужна Министерству обороны и разведслужбам, чтобы заниматься разведкой на основе открытых источников, прикрывать войска на передовой и так далее — а не чтобы помогать диссидентам, преступникам и пользователям торрентов.
Конечно, мы понимали, что этой технологии неизбежно найдётся и другое применение, но это не имело значения для задачи, которую мы решали. К тому же чем больше в сети будет трафика, тем легче нам будет спрятать то, ради чего мы её создавали.
DARPA продолжает спонсировать TOR и сейчас — уже в рамках новой программы RACE (Resilient Anonymous Communication for Everyone, «Надёжное анонимное общение для всех»). Среди других спонсоров TOR есть, например, правительство Швеции.
Разработчики не считают, что помогают преступникам: в FAQ проекта сказано, что запрет TOR всё равно не остановил бы преступления, а сеть предназначена для законопослушных людей, которые просто хотят сохранять анонимность и защищать свои данные.
PAL — приложение, переименованное в Siri
Ролик от DARPA, показывающий, как должен был работать PAL. Голос Siri уже на месте
В 2003 году DARPA выделило институту SRI International (тому же, который разработал робота Shakey) $150 млн по программе PAL (Personalized Assistant that Learns, «Персонализируемый обучаемый помощник»).
Целью программы было разработать программу-ассистента, которая бы помогала пользователям, в том числе с автоматизацией рутинных задач, составлением расписаний, тайм-менеджментом и поиском информации. Кроме того, она должна была поддерживать голосовое управление.
На эти деньги SRI разработал приложение CALO. CALO должно было не только выполнять все эти задачи, но и адаптироваться к пользователю, узнавать его предпочтения и «обдумывать свой опыт», чтобы работать с ним становилось ещё удобнее.
В 2007 году, когда DARPA отказалось от проекта, SRI открыл для проекта коммерческую компанию с немного изменённым названием — Siri, Inc. Через три года её приобрела Apple, и уже в iPhone 4S (2011) Siri стала предустановленным голосовым помощником.
Компания Boston Dynamics, создатель знаменитых роботов, была основана в 1992 году, но сначала занималась военными компьютерными симуляциями. Первого робота-собаку — BigDog — она разработала только в 2005 году, выиграв грант от DARPA.
Роботы Boston Dynamics изначально предназначались для армии: шагающие собаки должны были заменить автомобили в горах и других ландшафтах, по которым невозможно проехать на колёсах. Но DARPA cочли BigDog неприменимым для боевых условий — его бензиновый двигатель оказался слишком шумным. Проект, который обошёлся армии США в $42 млн, закрыли.
В 2016 году Boston Dynamics разработали более лёгкого, полностью электрического робота Spot — в видеороликах, собравших десятки миллионов просмотров, снимался именно он. Но Spot мог нести только 18 килограммов груза (против 150 у BigDog), поэтому DARPA отказалось и от него. Зато в 2019 году он поступил в коммерческую продажу.
Уважаемый посетитель, Вы зашли на сайт как незарегистрированный пользователь. Чтобы писать комментарии Вам необходимо зарегистрироваться либо войти на сайт под своим именем.
» Информация
Посетители, находящиеся в группе Гости, не могут оставлять комментарии к данной публикации. Зарегистрируйтесь на портале чтобы оставлять комментарии
Материалы предназначены только для ознакомления и обсуждения. Все права на публикации принадлежат их авторам и первоисточникам. Администрация сайта может не разделять мнения авторов и не несет ответственность за авторские материалы и перепечатку с других сайтов. Ресурс может содержать материалы 16+


















{kind=link}
{kind=link}
{kind=link}
{kind=link}